芯片键合技术广泛应用于半导体设备中,如CPU、内存条等电子产品。随着芯片尺寸的减小,键合技术变得越来越重要,对运动台的精度性能要求也越来越高,我们作为精密运动台的厂家,有着成熟的应用案例。
产品特点
-XY轴行程1250*1250mm。
-XY轴直驱结构,重复定位精度优于±1μm。
-最大速度1m/s,定制加速度30m/s²。
-龙门交叉解耦算法,提供双驱轴运动一致性。
-Z轴实现力控制。
-旋转轴定位抖动0.01arc sec。
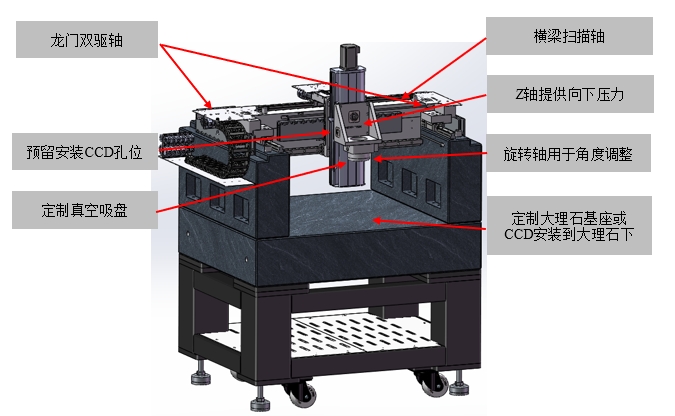
结构方案
Die Bonding 流程如下
1.零件通常放在托盘或托架上;
2.一个拾取工具(真空吸附或夹持器)拾取芯片,移动到相机上(通常是向上),以识别拾取工具中的零件/芯片的偏移量;
3.零件移动到底座上。一个向下的相机识别基准,计算与目标的偏移量;
4.将环氧树脂涂抹工具移动到目标上并涂抹环氧树脂;
5.芯片在靶上移动,用一定的力粘在基板上;
6.环氧树脂可能需要用紫外光等光源固化;
7.芯片一般为1mm见方,衬底可为几毫米至晶圆尺寸。
8.结合力一般为5N (0.5kg)~100N (10kg),有时持续几秒钟~1分钟。对准精度在每个XY方向上通常是1-2μm。
9.通常上视CCD用于计算零件(模具)的偏移量,下视CCD用于计算目标(基板)的偏移量。
Z轴力控制
-控制力≤1N ~ Nx10
-高分辨率基于压力传感器和电机电流输出
-可实现1μm的重复定位精度
-基于100Hz伺服的力控制回路
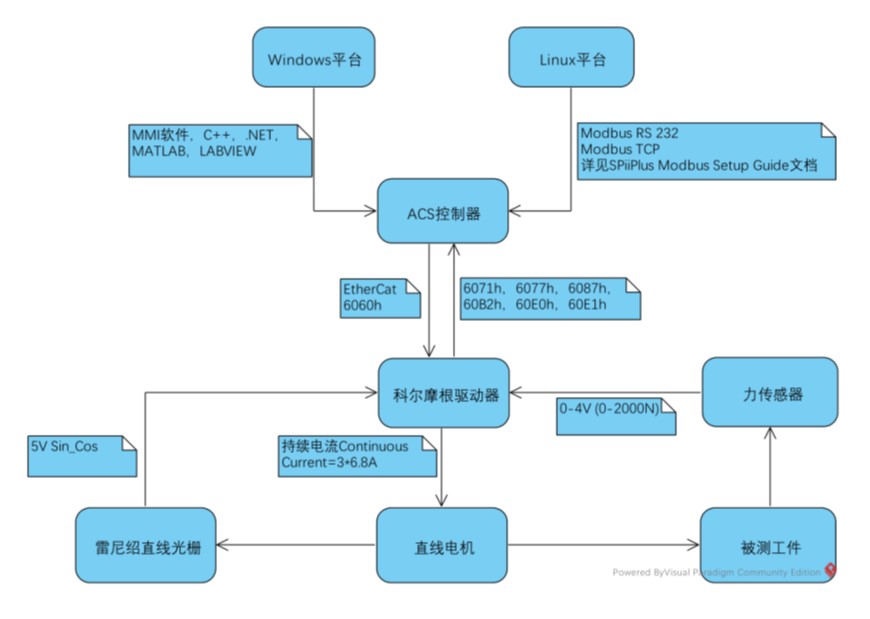
系统原理图
用户关注的问题及解决方案
| 用户关注的问题 |
解决方案 |
| 如何将视觉系统整合到运动系统中 |
使用CCD计算偏移量,并将其写入上位机界面,与运动控制软件集成,以做出适当的位置修正。 |
| 键合力的控制 |
自动对焦与压力传感器结合使用,驱动器将关闭位置回路与来自测压元件的输入,以确保施加适当的力。 |
|
如何满足位置精度
|
由于CCD相机正在识别偏移,精度上需要关注CCD到芯片之间的距离。
|
|
如何提升生产效率
|
提升XY轴的加速度和速度。非接触式光栅反馈提供更高的定位精度。
通过控制功能提供生产效率:
-减小整定时间
-控制命令消除相机或吸盘的结构振动
-高速移动,优化程序避免动作浪费
|